Trang chủ
>
Các sản phẩm > Mô-đun máy đo khoảng cách laze > Mô-đun tìm phạm vi laser 1535nm > Mô -đun tìm kiếm phạm vi 9km








Mô -đun tìm kiếm phạm vi 9km
Mô-đun tìm thấy STA-D0912Y 9km áp dụng mô-đun laser thủy tinh Erbium 1535nm được phát triển độc lập bởi JIOPTICS, có đặc điểm của mức tiêu thụ năng lượng thấp, cấu trúc nhỏ gọn, độ chính xác cao, khoảng cách đo dài và an toàn mắt người.
Gửi yêu cầu
Mô tả Sản phẩm
Phạm vi đo tối đa: 9000m (xe) 12000 m (tường)
Độ chính xác khác nhau ± 1m
Độ chính xác đo ≥ 98%
Trọng lượng ≤102g
Độ chính xác khác nhau ± 1m
Độ chính xác đo ≥ 98%
Trọng lượng ≤102g
Các tính năng mô -đun tìm kiếm phạm vi 9km
1. Thiết kế tích hợp toàn bộ cấu trúc, khả năng chống sốc, khả năng chống rung, độ tin cậy cao, khả năng thích ứng môi trường mạnh mẽ;
2. Việc sử dụng thiết kế cấu hình tích hợp laser Erbium Glass độc đáo và cài đặt niêm phong đa điểm về mặt cuối, độ bền cao, tuổi thọ dài, an toàn mắt;
3. Các giao diện bên trong của mạch đều áp dụng quy trình kết nối trực tiếp dây hàn, chắc chắn và đáng tin cậy, có thể tránh được sự tiếp xúc ngắn hoặc tiếp xúc kém do sự nới lỏng, oxy hóa và hơi nước của đầu nối, và cải thiện độ tin cậy và tuổi thọ của sản phẩm.
2. Việc sử dụng thiết kế cấu hình tích hợp laser Erbium Glass độc đáo và cài đặt niêm phong đa điểm về mặt cuối, độ bền cao, tuổi thọ dài, an toàn mắt;
3. Các giao diện bên trong của mạch đều áp dụng quy trình kết nối trực tiếp dây hàn, chắc chắn và đáng tin cậy, có thể tránh được sự tiếp xúc ngắn hoặc tiếp xúc kém do sự nới lỏng, oxy hóa và hơi nước của đầu nối, và cải thiện độ tin cậy và tuổi thọ của sản phẩm.
Chỉ số hiệu suất sản phẩm
| Mục | Chỉ mục | |
| Người mẫu | STA-D0912Y | |
| Bước sóng hoạt động | 1535nm ± 10nm | |
| Phạm vi phạm vi | 80m-12000m | |
| Khả năng khác nhau | 16000m | Mục tiêu điển hình, khả năng hiển thị ≥ 25km |
| 12000m | Mục tiêu lớn, khả năng hiển thị ≥ 25km | |
| 9000m | Tầm nhìn ≥ 25km, mục tiêu với độ phản xạ 0,3 cho xe 2,3m × 4,6m | |
| Độ ẩm | ≤ 80% | |
| Độ chính xác khác nhau | ± 1m | |
| Tỷ lệ chính xác | ≥98% | |
| Giải quyết phạm vi | ≤50m | |
| Góc phân kỳ | ≤0,5mrad | |
| Tần số khác nhau | Một lần, 1Hz, 5Hz | |
| Kích cỡ | ≤6MM × 59mm × 42mm | |
| Điện áp | 5V ~ 14V | |
| Tiêu thụ năng lượng làm việc | Tiêu thụ năng lượng trung bình: 3W 3W | |
| Tiêu thụ năng lượng dự phòng | ≤0,01W | |
| Nhiệt độ làm việc | -40+60 | |
| Nhiệt độ lưu trữ | -55+70 | |
| Cân nặng | ≤102g | |
Giao diện cài đặt cấu trúc


Giao diện điện
Đầu máy tính phía trên nhận ra thử nghiệm liên kết ngang với máy đo khoảng cách thông qua đầu nối 10pin. Định nghĩa pin của cổng cung cấp điện và giao tiếp ở đầu rangefinder được hiển thị trong bảng sau và vị trí của chân kết nối đầu nối 1 được hiển thị trong hình sau.
Định nghĩa pin của cổng cung cấp điện và giao tiếp ở cuối rangefinder
| Số pin | Con số | Định nghĩa về đặc điểm điện | Ghi chú |
| P-1 | Vin+ | Đầu vào năng lượng tích cực | Cung cấp điện |
| P-2 | Com | Cực âm của công suất đầu vào | |
| P-3 | Power_ctl | Cổng điều khiển điện thấp | Lơ lửng hoặc cao (3V ~ 9V) có hiệu lực |
| P-4 | Rs422_txd+ | Cổng đầu ra tín hiệu | Rangefinder đến máy tính lưu trữ |
| P-5 | Rs422_txd- | ||
| P-6 | Rs422_txd- | Cổng đầu vào tín hiệu | Máy tính trên để phân loại |
| P-7 | Rs422_txd+ | ||
| P-8 | GND | Dây điện giao tiếp | Dây điện giao tiếp |
| P-9 | TTL_RXD | Cổng đầu vào tín hiệu | 3.3V TTL |
| P-10 | TTL_TXD | Cổng đầu ra tín hiệu |
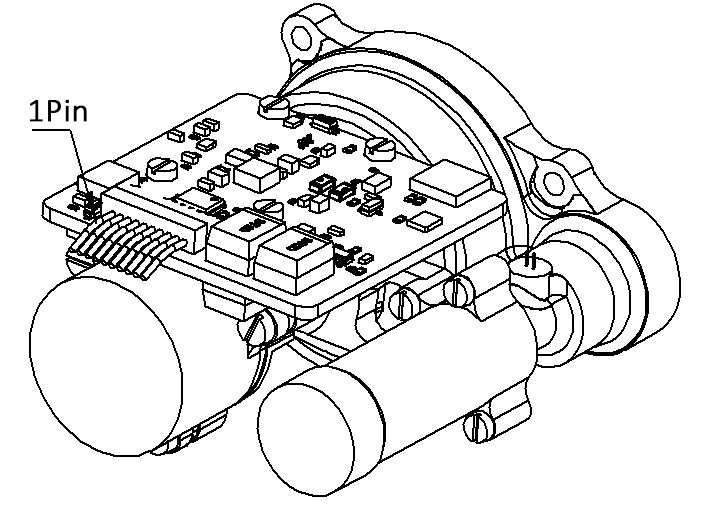
Kết nối đầu nối 1pin vị trí
Phần mềm
Dữ liệu
Dữ liệu
Việc truyền dữ liệu giữa RangeFinder và máy tính trên bao gồm các nội dung sau:
● Lệnh điều khiển: bao gồm hướng dẫn đơn, 1Hz, hướng dẫn khác nhau 5Hz, hướng dẫn truy vấn, v.v.;
● Trả về dữ liệu: bao gồm thông tin khoảng cách, nhiệt độ môi trường, trạng thái rangefinder, v.v.
Việc trao đổi dữ liệu giữa RangeFinder và Máy tính trên áp dụng RS422/TTL (hai lựa chọn 1) và các đặc điểm của nó như sau:
● Tốc độ baud: 38400 (nhà máy)/9600/57600/115200;
● Cấu trúc byte: thứ tự thấp ở phía trước, thứ tự cao ở phía sau;
● Thành phần byte: bit bắt đầu 1 bit, bit dữ liệu 8 bit, không kiểm tra, bit dừng 1 bit.
● Lệnh điều khiển: bao gồm hướng dẫn đơn, 1Hz, hướng dẫn khác nhau 5Hz, hướng dẫn truy vấn, v.v.;
● Trả về dữ liệu: bao gồm thông tin khoảng cách, nhiệt độ môi trường, trạng thái rangefinder, v.v.
Việc trao đổi dữ liệu giữa RangeFinder và Máy tính trên áp dụng RS422/TTL (hai lựa chọn 1) và các đặc điểm của nó như sau:
● Tốc độ baud: 38400 (nhà máy)/9600/57600/115200;
● Cấu trúc byte: thứ tự thấp ở phía trước, thứ tự cao ở phía sau;
● Thành phần byte: bit bắt đầu 1 bit, bit dữ liệu 8 bit, không kiểm tra, bit dừng 1 bit.
Thông tin
Định dạng của thông tin lệnh điều khiển được hiển thị trong bảng sau.
Kiểm soát thông tin lệnh nhận được bởi rangefinder
| Byte | Minh họa | Dữ liệu byte (từ lệnh, dữ liệu, kiểm tra bit) | Ghi chú |
| 1 | Khung tiêu đề | 0x55 |
|
| 2-5 |
|
1 phạm vi: 0xf2 0x00 0x00 0xf2 | Dữ liệu phản hồi được hiển thị trong bảng bên dưới |
| 1Hz Ranging: 0xf3 0x01 0x00 0xf2 | |||
| 5Hz Ranging: 0xf3 0x02 0x00 0xf1 | |||
| Dừng phạm vi: 0xf3 0x00 0x00 0xf3 | |||
| Cài đặt tốc độ baud: 0xf6 _ _0xxx | ____ Đặt tốc độ baud/100 (biểu diễn thập lục phân), trong đó 0xxx là XOR của 2-4 byte | ||
| Lệnh tự kiểm tra: 0xf0 0x00 0x00 0xf0 | Dữ liệu phản hồi được hiển thị trong bảng bên dưới | ||
| Hướng dẫn truy vấn: 0xf8 0x00 0x00 0xf8 | |||
| Cài đặt giá trị gating: 0xf4 ___ ___ 0xxx | ___ là giá trị nhấp nháy tập hợp (biểu diễn thập lục phân) và 0xxx là độc quyền hoặc 2 đến 4 byte. | ||
| 6 | Kết thúc khung hình | 0! |
|
Dữ liệu trả về của RangeFinder được chia thành dữ liệu thông thường và dữ liệu tự kiểm tra.
● Dữ liệu thông thường: Bao gồm số lượng mục tiêu, khoảng cách đo, trạng thái rangefinder, v.v. Xem bảng bên dưới.
● Dữ liệu truy vấn: bao gồm nhiệt độ môi trường, trạng thái rangefinder, v.v. Xem bảng bên dưới.
● Dữ liệu thông thường: Bao gồm số lượng mục tiêu, khoảng cách đo, trạng thái rangefinder, v.v. Xem bảng bên dưới.
● Dữ liệu truy vấn: bao gồm nhiệt độ môi trường, trạng thái rangefinder, v.v. Xem bảng bên dưới.
Dữ liệu thông thường được trả về bằng máy đo khoảng cách
| Byte | Minh họa | Giá trị byte (thập lục phân) |
| 1 | Tiêu đề | 0! |
| 2 | Số lượng mục tiêu |
|
| 3 | Byte cao của thông tin khoảng cách mục tiêu đầu tiên |
|
| 4 | Byte thấp của thông tin khoảng cách mục tiêu đầu tiên |
|
| 5 | Thông tin khoảng cách mục tiêu đầu tiên Các chữ số thập phân | Hai vị trí thập phân sau điểm thập phân |
| 6 | Byte cao của thông tin khoảng cách mục tiêu cuối cùng |
|
| 7 | Byte thấp của thông tin khoảng cách mục tiêu cuối cùng |
|
| 8 | Thông tin khoảng cách mục tiêu cuối cùng Các chữ số thập phân | Hai vị trí thập phân sau điểm thập phân |
| 9 | Byte trạng thái phạm vi | Từ trạng thái, xem bảng bên dưới |
| 10 ~ 13 | Số lượng ánh sáng |
|
| 14 | Kiểm tra Word | Byte 2-13 XOR |
| 15 | Kết thúc khung hình | 0x55 |
Ý nghĩa của từ trạng thái
| Số seri | Byte 9 | Ý nghĩa |
| 1 | 0xf2 | 1 phạm vi |
| 2 | 0xf3 | 1Hz dao động |
| 3 | 0xf4 | 5Hz khác nhau |
| 4 | 0xf5 | Ngừng phạm vi |
Dữ liệu truy vấn được gửi lại bởi rangefinder
| Byte | Minh họa | Giá trị byte (thập lục phân) |
| 1 | Khung tiêu đề | 0xcc |
| 2 | Chờ đợi | Chờ đợi |
| 3 | Nhiệt độ môi trường byte | Số có chữ ký 8 bit, đơn vị: ℃ |
| 4 | Thông tin tự kiểm tra byte | 0x 00 cho biết giá trị mặc định truy vấn 0x 03 chỉ ra rằng ánh sáng tự kiểm tra là bình thường 0xff cho thấy ánh sáng tự phát hiện bất thường |
| 5 | Byte tình trạng làm việc cường độ cao | 1: Bit cờ chế độ hoạt động bình thường 0: Bit cờ chế độ làm việc cường độ cao |
| 6 | Khoảng cách giá trị byte cao | Đại diện thập lục phân |
| 7 | Byte thấp của giá trị gating khoảng cách | |
| 8 | Tốc độ baud byte cao | Biểu diễn thập lục phân, tốc độ baud là dữ liệu loopback * 100 |
| 9 | Tốc độ baud byte thấp | |
| 10 | Số lượng ánh sáng cao 8 bit | Đại diện thập lục phân |
| 11 | ||
| 12 | Số lượng ánh sáng ra thấp 8 bit | |
| 13 | ||
| 14 | Kiểm tra Word | Byte 2-13 XOR |
| 15 | Kết thúc khung hình | 0x55 |
Cài đặt tốc độ baud
Phương pháp hoạt động cài đặt tốc độ baud:
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" Lệnh cho công cụ tìm phạm vi laser, i .e. Đặt tốc độ baud thành 9600bps; Rangefinder trả về "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" cho thấy tốc độ baud hiện tại đã được đặt thành 9600bps;
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" Lệnh đến trình phân từ laser, i .e. Đặt tốc độ baud thành 38400bps; Rangefinder trả về "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" và "0x 01 0x 80" chỉ ra rằng tốc độ baud hiện tại đã được đặt thành 38400bps;
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" vào máy đo độ dài laser, nghĩa là đặt tốc độ baud thành 57600bps; Rangefinder gửi lại "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55" và "0x 02 0x 40" cho thấy tốc độ baud hiện tại đã được đặt thành 57600bps;
D Đặt tốc độ baud thành 115200bps; Rangefinder trả về "CC 01 19 00 01 00 04 80 00 00 00 9D 55", "0x 04 0x 80" cho thấy tốc độ baud hiện tại đã được đặt thành 115200bps.
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" Lệnh cho công cụ tìm phạm vi laser, i .e. Đặt tốc độ baud thành 9600bps; Rangefinder trả về "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" cho thấy tốc độ baud hiện tại đã được đặt thành 9600bps;
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" Lệnh đến trình phân từ laser, i .e. Đặt tốc độ baud thành 38400bps; Rangefinder trả về "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" và "0x 01 0x 80" chỉ ra rằng tốc độ baud hiện tại đã được đặt thành 38400bps;
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" vào máy đo độ dài laser, nghĩa là đặt tốc độ baud thành 57600bps; Rangefinder gửi lại "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55" và "0x 02 0x 40" cho thấy tốc độ baud hiện tại đã được đặt thành 57600bps;
D Đặt tốc độ baud thành 115200bps; Rangefinder trả về "CC 01 19 00 01 00 04 80 00 00 00 9D 55", "0x 04 0x 80" cho thấy tốc độ baud hiện tại đã được đặt thành 115200bps.
Thẻ nóng: Mô -đun tìm kiếm phạm vi 9km, nhà sản xuất, nhà cung cấp, nhà máy, Trung Quốc, được sản xuất tại Trung Quốc, tùy chỉnh, chất lượng cao
Danh mục liên quan
Mô-đun tìm phạm vi laser 905nm
Mô-đun tìm phạm vi laser 1535nm
Mô-đun tìm phạm vi laser 1570nm
Mô -đun laser 1.54um
Chỉ định mục tiêu laser 1064nm
Mô -đun STEM chống drone
Mô-đun Lidar khác nhau
Gửi yêu cầu
Xin vui lòng gửi yêu cầu của bạn trong mẫu dưới đây. Chúng tôi sẽ trả lời bạn trong 24 giờ.