Trang chủ
>
Các sản phẩm > Con quay hồi chuyển sợi quang > Con quay hồi chuyển sợi quang > Con quay hồi chuyển sợi quang Fog Mems Đơn vị đo lường quán tính





Con quay hồi chuyển sợi quang Fog Mems Đơn vị đo lường quán tính
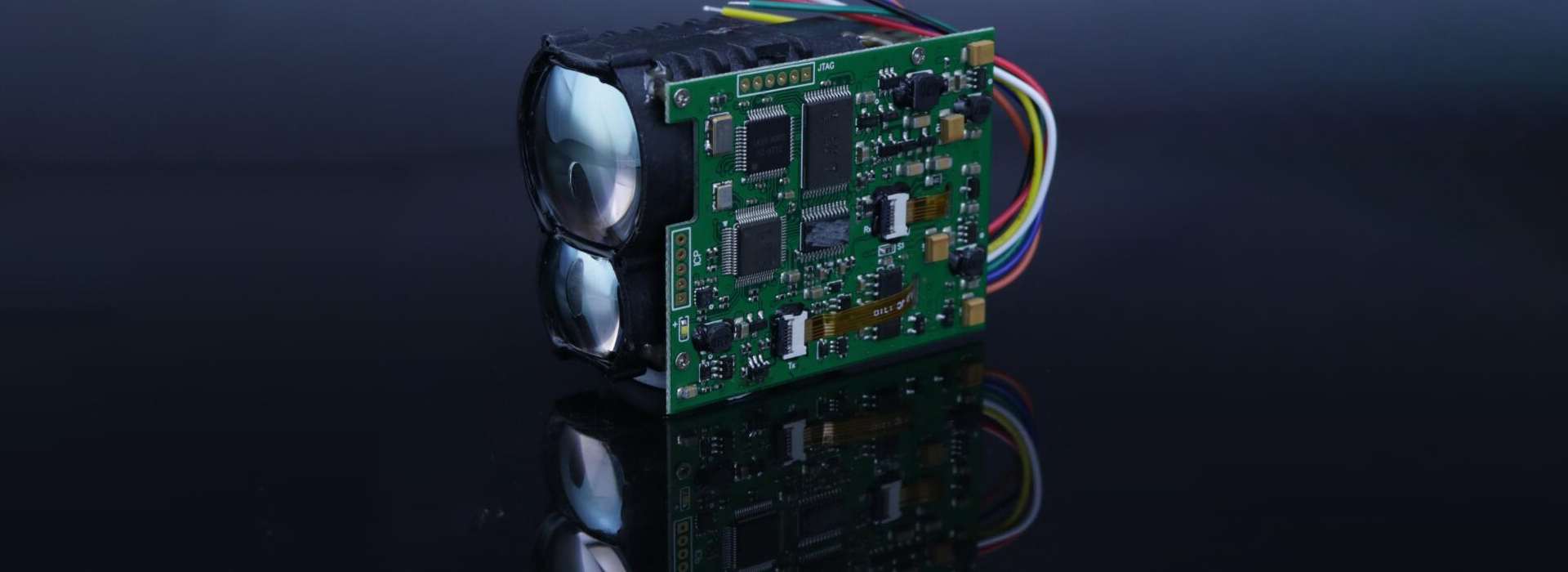
JIO-MC200-IMU là một đơn vị đo lường quán tính (IMU) dựa trên công nghệ vi cơ (MEMS) với con quay hồi chuyển MEMS hiệu suất cao và cảm biến gia tốc MEMS tích hợp tạo ra vận tốc góc 3 trục và gia tốc 3 trục. Chào mừng bạn đến mua Đơn vị đo quán tính con quay hồi chuyển sợi quang Fog Mems từ chúng tôi.
Người mẫu:JIO-MC200-IMU
Gửi yêu cầu
Mô tả Sản phẩm
Tổng quan về đơn vị đo lường quán tính của con quay hồi chuyển sợi quang Fog Mems
JIO-MC200-IMU là một đơn vị đo lường quán tính (IMU) dựa trên công nghệ vi cơ (MEMS) với con quay hồi chuyển MEMS hiệu suất cao và cảm biến gia tốc MEMS tích hợp tạo ra vận tốc góc 3 trục và gia tốc 3 trục.
JIO-MC200-IMU có khả năng thích ứng môi trường và tình dục tuyệt vời. Thông qua việc kết hợp các phần mềm khác nhau, các sản phẩm có thể được sử dụng rộng rãi trong đạn dẫn đường, UAV chiến thuật và công nghiệp, phương tiện bay không người lái, thiết bị tìm kiếm, xe tự lái.
JIOPTICS cài đặt con quay hồi chuyển sợi quang để dễ dàng tích hợp linh hoạt và bộ công cụ dành cho nhà phát triển của chúng tôi để tạo mẫu nhanh, không chỉ đáp ứng các yêu cầu về đặc điểm kỹ thuật mà còn cung cấp hiệu suất chất lượng cao đáp ứng nhu cầu của người dùng cuối.
JIO-MC200-IMU có khả năng thích ứng môi trường và tình dục tuyệt vời. Thông qua việc kết hợp các phần mềm khác nhau, các sản phẩm có thể được sử dụng rộng rãi trong đạn dẫn đường, UAV chiến thuật và công nghiệp, phương tiện bay không người lái, thiết bị tìm kiếm, xe tự lái.
JIOPTICS cài đặt con quay hồi chuyển sợi quang để dễ dàng tích hợp linh hoạt và bộ công cụ dành cho nhà phát triển của chúng tôi để tạo mẫu nhanh, không chỉ đáp ứng các yêu cầu về đặc điểm kỹ thuật mà còn cung cấp hiệu suất chất lượng cao đáp ứng nhu cầu của người dùng cuối.
Dịch vụ của chúng tôi
JIOPTICS là một đội ngũ chuyên nghiệp và hiệu quả. Cung cấp dịch vụ OEM/ODM cho bạn, hãy liên hệ với chúng tôi để tùy chỉnh con quay hồi chuyển sợi quang độc quyền của bạn
Tính năng sản phẩm
1) Con quay hồi chuyển kỹ thuật số ba trục:
a) Dải đo động ±450º/s;
b) Độ ổn định sai lệch bằng không: 20°/h (GJB,10S);
2) Gia tốc kế kỹ thuật số ba trục:
a) Dải đo động ±16g;
b) Độ ổn định sai lệch bằng 0: 0,5mg (GJB,10S);
3) Độ tin cậy cao: MTBF
4) Phạm vi nhiệt độ đầy đủ (-40â~70â) để đảm bảo độ chính xác: tích hợp thuật toán hiệu chỉnh và bù nhiệt độ hiệu suất cao;
5) Thích hợp làm việc trong điều kiện rung động mạnh;
6) Giao diện UART 1 chiều
a) Dải đo động ±450º/s;
b) Độ ổn định sai lệch bằng không: 20°/h (GJB,10S);
2) Gia tốc kế kỹ thuật số ba trục:
a) Dải đo động ±16g;
b) Độ ổn định sai lệch bằng 0: 0,5mg (GJB,10S);
3) Độ tin cậy cao: MTBF
4) Phạm vi nhiệt độ đầy đủ (-40â~70â) để đảm bảo độ chính xác: tích hợp thuật toán hiệu chỉnh và bù nhiệt độ hiệu suất cao;
5) Thích hợp làm việc trong điều kiện rung động mạnh;
6) Giao diện UART 1 chiều
trường ứng dụng
1) Đạn dược dẫn đường
2) Người tìm kiếm
3) Máy bay không người lái chiến thuật và công nghiệp
4) Lái tự động
2) Người tìm kiếm
3) Máy bay không người lái chiến thuật và công nghiệp
4) Lái tự động
Đặc điểm điện từ
- Nguồn điện: ngõ vào điện áp rộng 12~36V
- Công suất định mức: 24W (tối đa)
- Công suất định mức: 24W (tối đa)
chỉ số sản phẩm
| Thông số |
điều kiện thử nghiệm |
tối thiểu |
giá trị điển hình |
Gia trị lơn nhât |
Các đơn vị |
|
| con quay hồi chuyển |
Dải đo động |
|
|
450 |
|
°/s |
| Độ ổn định không sai lệch |
Trung bình 10 giây (-40â~ 70â, nhiệt độ không đổi) |
|
20 |
|
°/h. |
|
| Không thiên vị |
Phạm vi sai lệch bằng không |
|
/ - 0,2 |
|
°/s |
|
| Độ lệch bằng không â trên toàn bộ phạm vi nhiệt độ |
|
/ - 0,1 |
|
°/s |
||
| Khả năng lặp lại cho các lần khởi động liên tiếp, trục Z |
|
30 |
|
°/h. |
||
| Ảnh hưởng của gia tốc tuyến tính đến độ lệch bằng không |
|
10 |
|
°/h/g |
||
| Rung â¡ trên hiệu ứng sai lệch bằng không, trước và sau khi thay đổi rung |
|
10 |
|
°/h/g |
||
| Hiệu ứng rung â¡ về 0, rung sau khi rung thay đổi |
|
10 |
|
°/h/g |
||
| Yếu tố quy mô |
Hệ số tỷ lệ là phi tuyến tính |
|
500 |
|
ppm |
|
| Độ chính xác của hệ số tỷ lệ |
|
2000 |
|
ppm |
||
| mật độ tiếng ồn |
|
|
0.003 |
|
° / Hz/giây) |
|
| Nghị quyết |
|
|
3,052 x 10–7 |
|
°/s/LSB |
|
| gia tốc kế |
Dải đo động |
|
|
16 |
|
g |
| Độ ổn định không sai lệch |
Trung bình 10 giây (-40â~ 70â, nhiệt độ không đổi) |
|
0.5 |
|
mg |
|
| Không thiên vị |
Phạm vi sai lệch bằng không |
|
5 |
|
mg |
|
| Độ lệch bằng 0 trên phạm vi nhiệt độ đầy đủ |
|
5 |
|
mg |
||
| Khả năng lặp lại bắt đầu liên tiếp |
|
0.5 |
|
mg |
||
| Yếu tố quy mô |
Hệ số tỷ lệ là phi tuyến tính |
|
500 |
|
ppm |
|
| Độ chính xác của hệ số tỷ lệ |
|
2000 |
|
ppm |
||
| mật độ tiếng ồn |
|
|
0.05 |
|
Hz/mg) |
|
| Nghị quyết |
|
|
1,221 x 10–8 |
|
g/LSB |
|
| Khác |
thời gian khởi động |
|
|
2 |
|
s |
| Thông số |
điều kiện thử nghiệm |
tối thiểu |
đặc trưng |
giá trị |
gia trị lơn nhât |
các đơn vị |
| của cải |
Băng thông |
|
|
200 |
|
Hz |
| Trì hoãn |
|
|
10 |
|
bệnh đa xơ cứng |
|
| Phương thức giao tiếp |
UART 1 chiều |
Tốc độ truyền |
|
460.8 |
|
kbps |
| Tần số lấy mẫu |
UART |
|
500 |
|
Hz |
|
| Đặc điểm điện từ |
Vôn |
|
4.8 |
5 |
5.2 |
V |
| Sự tiêu thụ năng lượng |
|
|
1.5 |
|
W |
|
| Gợn sóng |
P-P |
|
100 |
|
mV |
|
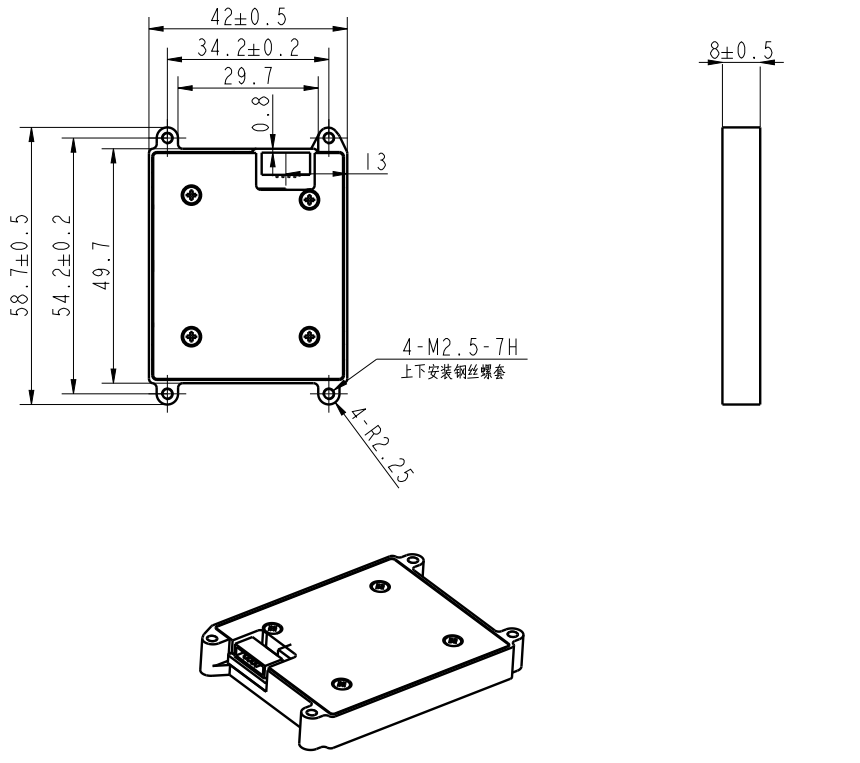
| Đặc điểm cấu trúc |
Kích cỡ |
|
|
58,7 x 42 x 8 |
|
mm |
| Cân nặng |
|
|
35 |
|
g |
|
| Môi trường sử dụng |
Nhiệt độ hoạt động |
|
- 40 |
|
70 |
℃ |
| Nhiệt độ bảo quản |
|
- 45 |
|
75 |
℃ |
|
| Rung động |
|
|
20 đến 2000Hz, 6,06g |
|
|
|
| Sự va chạm |
|
|
500g |
|
|
|
| Môi trường sử dụng |
MTBF |
|
|
20000 |
|
h |
| Giờ làm việc liên tục |
|
|
120 |
|
h |
|
| â : Tính độ lệch 0 của toàn bộ quá trình biến thiên nhiệt độ, tốc độ biến thiên nhiệt độ â¤1â/phút, phạm vi nhiệt độ -40â~ 70â; â¡ : điều kiện rung là 6,06g, 20Hz~2000Hz |
||||||
giao diện điện
Loại đầu nối: A1251WR-S-4P;
Các điểm kết nối được xác định trong bảng sau:
Các điểm kết nối được xác định trong bảng sau:
| ghim |
Sự định nghĩa |
Chức năng |
Nhận xét |
|
1 |
5V |
đầu vào nguồn dc |
|
|
2 |
GND |
ĐẾN |
|
|
3 |
TX LV-TTL |
Gửi cổng nối tiếp |
3,3 V |
|
4 |
RX LV-TTL |
Tiếp nhận cổng nối tiếp |
3,3 V |
giao diện phần mềm
Tốc độ truyền: 460800bps;
Gửi tần số: 500Hz;
Định dạng dữ liệu: Bit dữ liệu 8, bit dừng 1, không có bit chẵn lẻ;
Khi dữ liệu được truyền đi, nó ở mức thấp và sau đó là mức cao.
Các giao thức truyền thông được hiển thị trong bảng sau:
Gửi tần số: 500Hz;
Định dạng dữ liệu: Bit dữ liệu 8, bit dừng 1, không có bit chẵn lẻ;
Khi dữ liệu được truyền đi, nó ở mức thấp và sau đó là mức cao.
Các giao thức truyền thông được hiển thị trong bảng sau:
| byte |
Dữ liệu |
Hình thức |
Nghị quyết |
Nhận xét |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
Tốc độ góc X |
trôi nổi |
|
|
| 7-10 |
tỷ lệ góc Y |
trôi nổi |
|
|
| 14-11 |
Tốc độ góc Z |
trôi nổi |
|
|
| 15-18 |
Tốc độ góc X |
trôi nổi |
|
|
| 19-22 |
tỷ lệ góc Y |
trôi nổi |
|
|
| 23-26 |
Tốc độ góc Z |
trôi nổi |
|
|
| 27-30 |
Kín đáo |
Uint8 |
|
|
|
31 |
Nhiệt độ |
int8 |
1 â |
Phạm vi: -128 đến 127 |
|
32 |
Và kiểm tra |
Uint8 |
|
1-31 byte cộng lại và giảm 8 bit |
giao diện kết cấu
Thẻ nóng: Con quay hồi chuyển sợi quang Fog Mems Đơn vị đo lường quán tính, Nhà sản xuất, Nhà cung cấp, Nhà máy, Trung Quốc, Sản xuất tại Trung Quốc, Tùy chỉnh, Chất lượng cao
Danh mục liên quan
Gửi yêu cầu
Xin vui lòng gửi yêu cầu của bạn trong mẫu dưới đây. Chúng tôi sẽ trả lời bạn trong 24 giờ.
Những sảm phẩm tương tự