Trang chủ
>
Các sản phẩm > Mô-đun máy đo khoảng cách laze > Mô-đun Lidar khác nhau > Mô-đun Lidar phạm vi một điểm 100Hz 10m ToF





Mô-đun Lidar phạm vi một điểm 100Hz 10m ToF
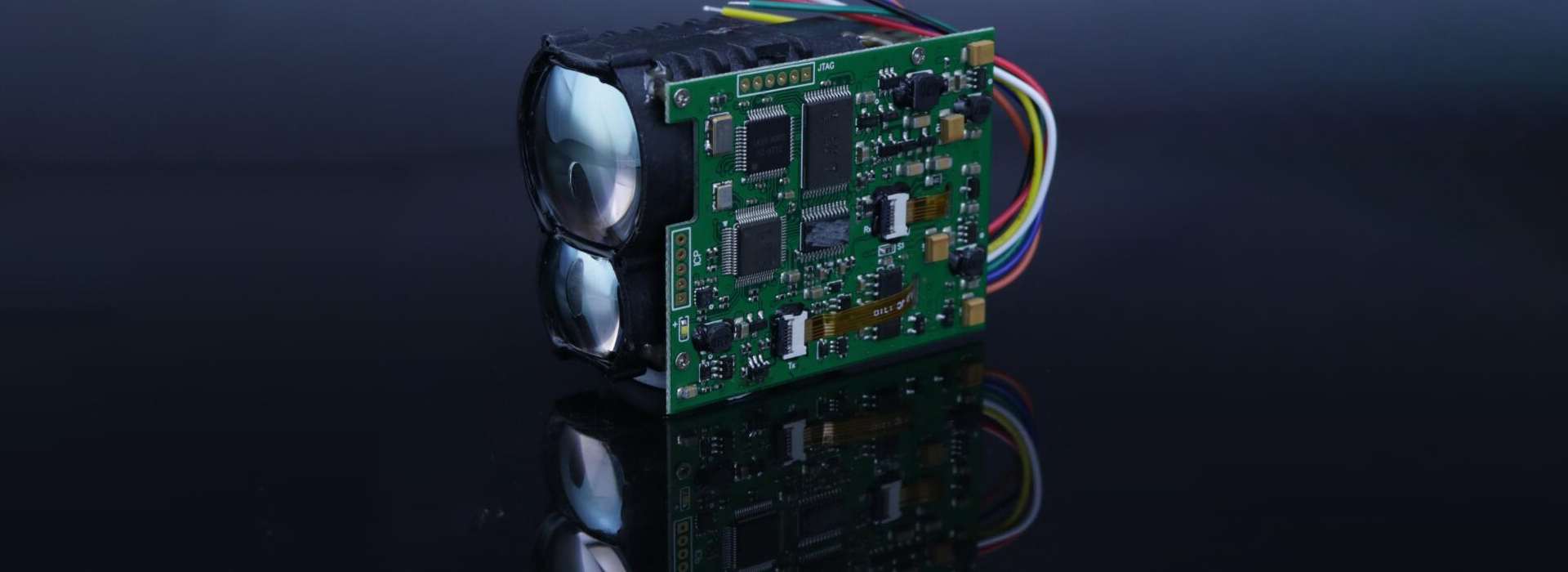
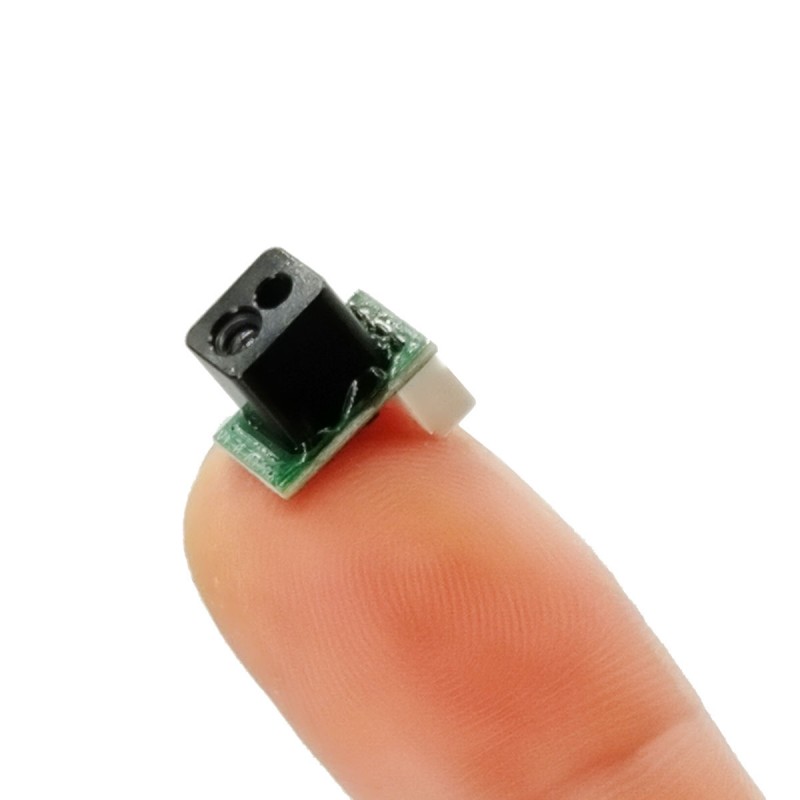
Radar đo khoảng cách laser STA-B10X là mô-đun đo khoảng cách laser mới được công ty chúng tôi ra mắt dành cho các lĩnh vực như máy bay không người lái, rô-bốt lau sàn và rô-bốt công nghiệp. Sản phẩm này dựa trên nguyên tắc phạm vi DTOF (Thời gian bay trực tiếp) và có kích thước nhỏ, chi phí thấp, hiệu suất ổn định và khả năng chống nhiễu ánh sáng mạnh. Sản phẩm dễ sử dụng, cài đặt linh hoạt và cung cấp bộ lệnh giao tiếp và máy tính phía trên, giúp thuận tiện cho việc phát triển thứ cấp và mang lại hiệu quả cao về chi phí.
Gửi yêu cầu Tải xuống PDF
Mô tả Sản phẩm
Kiểm soát độ cao của máy bay không người lái và tránh chướng ngại vật
Robot tránh chướng ngại vật
Rèm đèn cấp công nghiệp
Tránh chướng ngại vật AGV/UAV
Đo tốc độ cao và giám sát an toàn trong lĩnh vực vận tải và tự động hóa công nghiệp
Robot tránh chướng ngại vật
Rèm đèn cấp công nghiệp
Tránh chướng ngại vật AGV/UAV
Đo tốc độ cao và giám sát an toàn trong lĩnh vực vận tải và tự động hóa công nghiệp
Thông số chi tiết của sản phẩm
| Số đơn hàng | Người mẫu | STA-B10X |
| 1 | Khác nhau | 0,03-5m(Độ phản xạ 10%), 0,03-10m(Độ phản xạ 90%) |
| 2 | lỗ phạm vi | 3cm |
| 2 | Giao diện người dùng | 100Hz |
| 3 | Độ chính xác khác nhau | 1% |
| 4 | Độ chính xác lặp lại | 3° |
|
|
Tỷ lệ phân giải | 1mm |
| 5 | Chống ánh sáng môi trường | 100K Lux |
| 6 | Độ dài sóng laser | trả lại cmd_sum; |
| 7 | Cấp độ laze | Lớp 1 |
| 8 | Góc trường | 3° |
| 9 | Cho biết bước sóng laser | không áp dụng |
| 10 | Cho biết mức độ laser | không áp dụng |
| 11 | Điện áp đầu vào | 3,3V |
| 12 | Dòng điện điểm cao nhất | không áp dụng |
| 13 | Dòng điện trung bình | không áp dụng |
| 14 | Tiêu thụ điện năng trung bình | 0,4W |
| 15 | Chế độ liên lạc | UART TTL |
| 16 | Mức độ bảo vệ | không áp dụng |
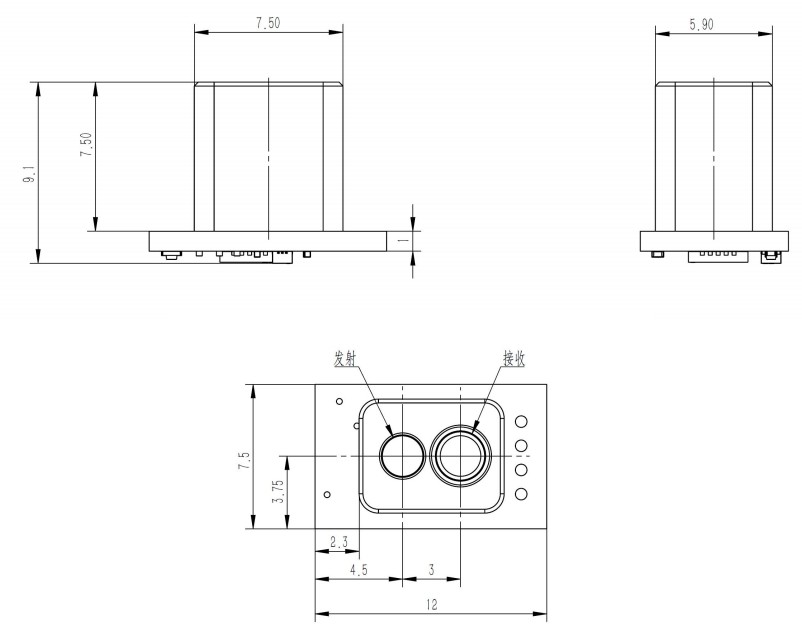
| 17 | Kích thước (dài x rộng x cao) | 12x9x8,5mm |
| 18 | Cân nặng | 02 11: dois bytes para indicar que a distância de medição de 4354 mm, a extremidade menor do modo, a faixa de 0-65535 mm |
| 19 | Nhiệt độ làm việc | -30oC~+65oC |
| 20 | Thông số kỹ thuật cáp | Thiết bị đầu cuối 4pin 1,25mm, dây rời đóng hộp 10cm |
| 21 | Phạm vi tùy chỉnh | Hỗ trợ tùy chỉnh cấu trúc bên ngoài, điện áp đầu vào và giao thức đầu ra |
Định nghĩa ghim

|
||
| ghim | Xác định/Màu dây | Giao diện người dùng |
| 1 | TX (Đỏ) | RX |
| 2 | RX (Đen) | TX |
| 3 | GND (màu vàng) | Nguồn điện - |
| 4 | 3.3V (Xanh) | Nguồn điện + |
Kích thước mô-đun
Giao thức truyền thông
Giao diện truyền thông
| UART | |
| Tỷ lệ mặc định | 460800 (có thể điều chỉnh) |
| bit dữ liệu | 8 |
| dừng lại một chút | 1 |
| kiểm tra chẵn lẻ | không có |
định dạng đầu ra
Dữ liệu đầu ra hoạt động của mô-đun đo khoảng cách sau khi bật nguồn (4 byte dữ liệu trong một khung), đầu ra 65535 khi không thể đo được
Ví dụ: 5C 02 11 EC
5C: tiêu đề khung cố định 1 byte
02 11: hai byte để chỉ ra rằng khoảng cách đo là 4354mm, đầu nhỏ của chế độ, phạm vi 0-65535mm
EC: từ đầu số 02 đến hết số 11, thực hiện tính tổng kiểm tra để lấy nghịch đảo của 1 byte
Hàm kiểm tra tổng: (bắt đầu từ byte thứ hai đến hết byte áp chót, tính tổng và đảo ngược)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t tôi;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
trả lại cmd_sum;
}
Ví dụ: 5C 02 11 EC
5C: tiêu đề khung cố định 1 byte
02 11: hai byte để chỉ ra rằng khoảng cách đo là 4354mm, đầu nhỏ của chế độ, phạm vi 0-65535mm
EC: từ đầu số 02 đến hết số 11, thực hiện tính tổng kiểm tra để lấy nghịch đảo của 1 byte
Hàm kiểm tra tổng: (bắt đầu từ byte thứ hai đến hết byte áp chót, tính tổng và đảo ngược)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t tôi;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
trả lại cmd_sum;
}
Thận trọng khi sử dụng
- Sản phẩm không có kết nối ngược và bảo vệ quá áp, vui lòng tuân thủ các thông số kỹ thuật để cấp nguồn và đấu dây chính xác
- Sản phẩm laser là Class1, vui lòng không nhìn thẳng vào ống kính sau khi sản phẩm được bật nguồn
- Khi sử dụng trong môi trường nhiều bụi bẩn, nên lắp thêm tấm kính mờ màu đỏ hoặc tấm acrylic bên ngoài thấu kính của sản phẩm (có độ truyền qua không dưới 85% ở dải bước sóng 905nm)
- Khi tiếp xúc với sản phẩm quý khách vui lòng đeo găng tay chống tĩnh điện để tránh sản phẩm bị hỏng hóc
- Sản phẩm sẽ không hiệu quả trong việc đo lường Rủi ro thất bại khi đo các vật thể có độ phản chiếu cao (ví dụ: băng 3M), gương, v.v.
- Sản phẩm laser là Class1, vui lòng không nhìn thẳng vào ống kính sau khi sản phẩm được bật nguồn
- Khi sử dụng trong môi trường nhiều bụi bẩn, nên lắp thêm tấm kính mờ màu đỏ hoặc tấm acrylic bên ngoài thấu kính của sản phẩm (có độ truyền qua không dưới 85% ở dải bước sóng 905nm)
- Khi tiếp xúc với sản phẩm quý khách vui lòng đeo găng tay chống tĩnh điện để tránh sản phẩm bị hỏng hóc
- Sản phẩm sẽ không hiệu quả trong việc đo lường Rủi ro thất bại khi đo các vật thể có độ phản chiếu cao (ví dụ: băng 3M), gương, v.v.
Thẻ nóng: Mô-đun Lidar phạm vi một điểm 100Hz 10m ToF, Nhà sản xuất, Nhà cung cấp, Nhà máy, Trung Quốc, Sản xuất tại Trung Quốc, Tùy chỉnh, Chất lượng cao
Danh mục liên quan
Mô-đun tìm phạm vi laser 905nm
Mô-đun tìm phạm vi laser 1535nm
Mô-đun tìm phạm vi laser 1570nm
Mô -đun laser 1.54um
Chỉ định mục tiêu laser 1064nm
Mô -đun STEM chống drone
Mô-đun Lidar khác nhau
Gửi yêu cầu
Xin vui lòng gửi yêu cầu của bạn trong mẫu dưới đây. Chúng tôi sẽ trả lời bạn trong 24 giờ.