Trang chủ
>
Các sản phẩm > Mô-đun máy đo khoảng cách laze > Mô-đun tìm phạm vi laser 1535nm > Mô-đun đo khoảng cách laser an toàn cho mắt 5km (LRF)




")




Mô-đun đo khoảng cách laser an toàn cho mắt 5km (LRF)
STA-B50MX là mô-đun đo khoảng cách bằng laser an toàn cho mắt người, có thể phát hiện khoảng cách mục tiêu và truyền khoảng cách đo được đến máy tính phía trên thông qua giao tiếp nối tiếp. Tầm nhìn ≥ 12km, độ phản xạ mục tiêu ≥ 0,3, độ ẩm ≤ 80%, phương tiện (mục tiêu NATO 2,3m × 2,3m) khoảng cách ≥5km.
Gửi yêu cầu
Mô tả Sản phẩm
Chức năng chính
(1) Đo cự ly đơn và đo cự ly liên tục;
(2) Đáp ứng các lệnh đo khoảng cách laser và có thể dừng phạm vi bất cứ lúc nào theo lệnh dừng;
(3) Xuất dữ liệu khoảng cách và thông tin trạng thái một lần trên mỗi xung trong quá trình đo khoảng cách;
(4) Nó có thể báo cáo số xung laser truyền tích lũy (không bị mất điện);
(5) Lựa chọn khoảng cách, chỉ báo mục tiêu phía trước và phía sau;
(6) Chức năng tự kiểm tra.
(2) Đáp ứng các lệnh đo khoảng cách laser và có thể dừng phạm vi bất cứ lúc nào theo lệnh dừng;
(3) Xuất dữ liệu khoảng cách và thông tin trạng thái một lần trên mỗi xung trong quá trình đo khoảng cách;
(4) Nó có thể báo cáo số xung laser truyền tích lũy (không bị mất điện);
(5) Lựa chọn khoảng cách, chỉ báo mục tiêu phía trước và phía sau;
(6) Chức năng tự kiểm tra.
Chỉ số hiệu suất sản phẩm
| Mục | Thông số kỹ thuật | Chỉ dẫn |
| Người mẫu | STA-B50MX | |
| Bước sóng làm việc | 1535±5nm | |
| An toàn cho mắt | Loại 1 (IEC 60825-1) | |
| Nhận khẩu độ | Φ25mm | |
| Khẩu độ phát xạ | Φ10mm | |
| Khả năng khác nhau | 30-8000m | |
| Phạm vi khác nhau | ≥10000m | Phạm vi MAX, Độ phản xạ: 0,9, tầm nhìn của người quan sát 25km |
| ≥7000m | Mục tiêu tòa nhà lớn, Độ phản xạ: 0,6, tầm nhìn của người quan sát 20 km | |
| ≥5000m | mục tiêu của NATO | |
| ≥3000m | Mục tiêu con người | |
| ≥1500m | mục tiêu máy bay không người lái | |
| Phạm vi nhỏ | 30m |
|
| Phát hiện đa mục tiêu | Tối đa 3 mục tiêu |
|
| Độ phân giải phạm vi | 30m |
|
| Độ chính xác khác nhau | ±1m |
|
| Tần số dao động | Điều chỉnh 1 ~ 10Hz |
|
| Tỷ lệ chính xác | ≥98% |
|
| Tỷ lệ báo động sai | 1% |
|
| Góc phân kỳ | .50,5mrad |
|
| Giao diện truyền thông | RS422 | Giao diện TTL/RS232 có thể được tùy chỉnh |
| Điện áp | DC9~32V |
|
| Tiêu thụ điện năng | 1,2W(@1hz) | Công suất làm việc |
| 5W@12V | Công suất cực đại | |
| 0,1W | Nguồn dự phòng (Kết nối POWER-ON) | |
| Độ ổn định trục quang học của laser | .050,05mrad |
|
| Lỗi song song | .30,3mrad | Lỗi song song của trục quang với tham chiếu lắp |
| Sốc cơ học | 75g, 1ms |
|
| Nhiệt độ làm việc | -40oC~+70oC |
|
| Nhiệt độ bảo quản | -55oC~+75oC |
|
| Độ tin cậy | MTBF ≥ 1500h |
|
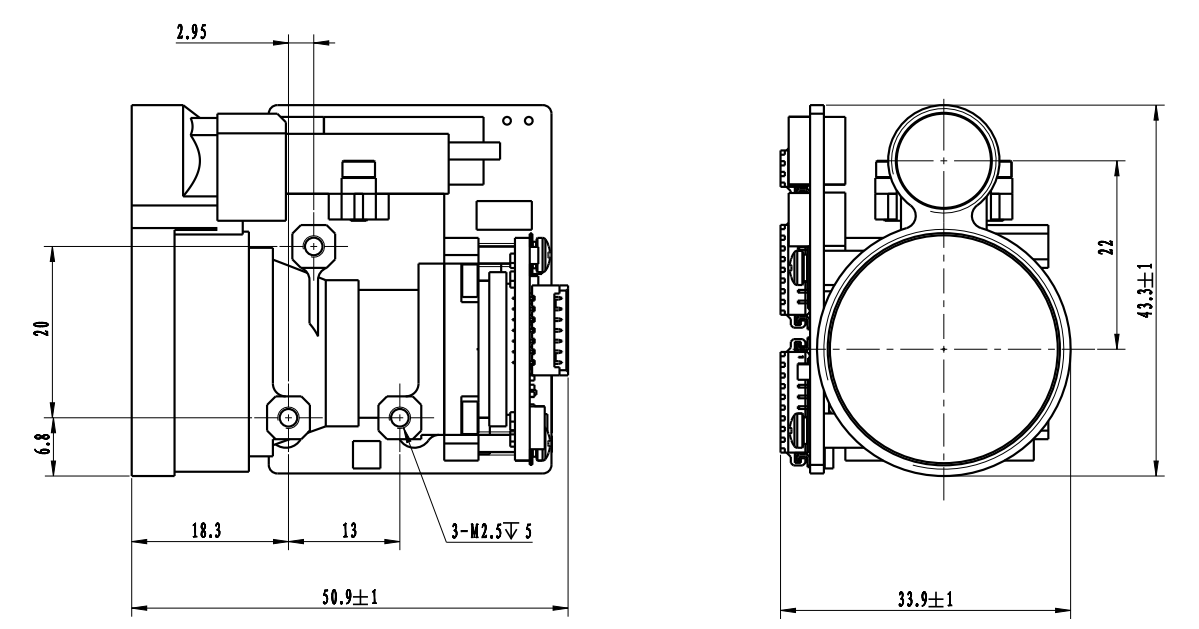
| Kích cỡ | 50x32x43,5mm |
|
| Cân nặng | 75g |
|
| Chức năng chính | Phạm vi mục tiêu đầu tiên và cuối cùng, Phạm vi đa mục tiêu, Chọn lọc khoảng cách | |
Ghi chú:
1) Kích thước mục tiêu của NATO là 2,3 m × 2,3 m; Kích thước mục tiêu của con người là 0,5 m × 1,7 m; Kích thước mục tiêu UAV 0,2 m × 0,3 m; Độ phản xạ 30%, Độ ẩm<80%, tầm nhìn của người quan sát> 12km
Giao diện cài đặt cấu trúc
Giao diện bên ngoài
| Ghim | Sự định nghĩa | Chức năng | Ghi chú |
| 1 | RX+ | Bộ thu RS422 + | Màu xanh da trời |
| 2 | RX- | Bộ thu RS422 - | Màu xanh lá |
| 3 | TX- | Truyền RS422 - | Màu tím |
| 4 | TX+ | Truyền RS422 + | Màu vàng |
| 5 | GND | Dây nối đất truyền thông | Trắng |
| 6 | VEE | Nguồn điện + | Màu đỏ |
| 7 | GND | Nguồn điện - | Đen |
| 8 | LÒ PWR VN | / | Tro |
Giao diện bên ngoài
Các mô-đun và giải pháp tùy chỉnh OEM/ODM
B50MX được thiết kế dành cho các nhà tích hợp hệ thống đang tìm kiếm giải pháp đo khoảng cách laser thuận tiện, mạnh mẽ và nhỏ gọn. Nó cung cấp hiệu suất đáng tin cậy trong một loạt các ứng dụng.
Nó rất nhỏ, siêu nhẹ, tiêu thụ điện năng thấp và có thể đo được ở khoảng cách xa. Nó phù hợp cho các thiết bị cầm tay (ảnh nhiệt), ứng dụng gắn vũ khí, hệ thống di động và bộ cảm biến hạng nhẹ cũng như máy bay không người lái hoặc UGV.
B50MX được thiết kế dành cho các nhà tích hợp hệ thống đang tìm kiếm giải pháp đo khoảng cách laser thuận tiện, mạnh mẽ và nhỏ gọn. Nó cung cấp hiệu suất đáng tin cậy trong một loạt các ứng dụng.
Nó rất nhỏ, siêu nhẹ, tiêu thụ điện năng thấp và có thể đo được ở khoảng cách xa. Nó phù hợp cho các thiết bị cầm tay (ảnh nhiệt), ứng dụng gắn vũ khí, hệ thống di động và bộ cảm biến hạng nhẹ cũng như máy bay không người lái hoặc UGV.
Giao thức giao tiếp
1. Giao thức truyền dẫn: giao tiếp nối tiếp không đồng bộ;
2. Tốc độ cổng: 115200;
3. Bit dữ liệu: 10 bit: một bit bắt đầu, 8 bit dữ liệu, một bit dừng, xác minh không hợp lệ;
4. Cấu trúc dữ liệu: Dữ liệu bao gồm byte tiêu đề, phần lệnh, độ dài dữ liệu, phần tham số và byte kiểm tra;
5. Chế độ liên lạc: bộ điều khiển chính gửi các lệnh điều khiển đến máy đo khoảng cách và máy đo khoảng cách nhận và thực hiện các hướng dẫn. Ở trạng thái đo cự ly, máy đo cự ly sẽ gửi dữ liệu và trạng thái của máy đo cự ly trở lại máy tính phía trên theo chu kỳ đo cự ly. Định dạng truyền thông và nội dung lệnh được hiển thị trong bảng sau.
A) Điều khiển chính gửi
Định dạng của tin nhắn được gửi như sau:
2. Tốc độ cổng: 115200;
3. Bit dữ liệu: 10 bit: một bit bắt đầu, 8 bit dữ liệu, một bit dừng, xác minh không hợp lệ;
4. Cấu trúc dữ liệu: Dữ liệu bao gồm byte tiêu đề, phần lệnh, độ dài dữ liệu, phần tham số và byte kiểm tra;
5. Chế độ liên lạc: bộ điều khiển chính gửi các lệnh điều khiển đến máy đo khoảng cách và máy đo khoảng cách nhận và thực hiện các hướng dẫn. Ở trạng thái đo cự ly, máy đo cự ly sẽ gửi dữ liệu và trạng thái của máy đo cự ly trở lại máy tính phía trên theo chu kỳ đo cự ly. Định dạng truyền thông và nội dung lệnh được hiển thị trong bảng sau.
A) Điều khiển chính gửi
Định dạng của tin nhắn được gửi như sau:
| STX0 | CMD | LEN | DỮ LIỆU1H | DATA1L | CHK |
Bảng 2 Mô tả định dạng của tin nhắn được gửi
| số thứ tự | tên | giải thích | mã số | nhận xét |
| 1 | STX0 | Cờ bắt đầu tin nhắn | A5(H) |
|
| 2 | CMD | CW | Xem bảng 3 |
|
| 3 | LEN | DL | Số lượng tất cả các byte ngoại trừ dấu bắt đầu, từ lệnh và tổng kiểm tra |
|
| 4 | DATAH | tham số | Xem bảng 3 |
|
| 5 | DỮ LIỆU |
|
||
| 6 | CHK | Xác minh XOR | Ngoại trừ byte hợp lệ, tất cả các byte khác đều được XOR |
|
Lệnh được mô tả như sau:
Bảng 3 Mô tả các lệnh và từ dữ liệu được thuyền trưởng gửi đến máy đo khoảng cách
Bảng 3 Mô tả các lệnh và từ dữ liệu được thuyền trưởng gửi đến máy đo khoảng cách
| số thứ tự | CW | chức năng | byte dữ liệu | nhận xét | chiều dài | Mã ví dụ |
| 1 | 0x00 | ngưng | DATAH=00(H)DATAL=00(H) | Máy đo khoảng cách ngừng đo | Sáu byte | A5 00 02 00 00 A7 |
| 2 | 0x01 | phạm vi đơn | DATAH=00(H)DATAL=00(H) |
|
Sáu byte | A5 01 02 00 00 A6 |
| 3 | 0x02 | Phạm vi liên tục | DATAH=XX(H)DATAL=YY(H) | DATA mô tả khoảng thời gian khác nhau, tính bằng ms | Sáu byte | A5 02 02 03 E8 4E (dải 1Hz) |
| 4 | 0x03 | tự kiểm tra | DATAH=00(H)DATAL=00(H) |
|
Sáu byte | A5 03 02 00 00 A4 |
| 5 | 0x04 | Đặt khoảng cách gần nhất với vùng chọn | DATAH=XX(H)DATAL=YY(H) | DATA mô tả giá trị vùng mù, đơn vị 1m | Sáu byte | A5 04 02 00 64 C7(100m là khoảng cách gần nhất) |
| 6 | 0x06 | Số lượng truy vấn đầu ra ánh sáng tích lũy | DATAH=00(H)DATAL=00(H) | Số lượng truy vấn đầu ra ánh sáng tích lũy | Sáu byte | A5 06 02 00 00 A1 |
| 7 | 0x11 | Nguồn APD đang bật | DATAH=00(H)DATAL=00(H) |
|
Sáu byte | A5 11 02 00 00 B6 |
| 8 | 0x12 | Nguồn APD tắt | DATAH=00(H)DATAL=00(H) |
|
Sáu byte | A5 12 02 00 00 B5 |
| 9 | 0xEB | Truy vấn số | DATAH=00(H)DATAL=00(H) | Truy vấn số | Sáu byte | A5 EB 02 00 00 4C |
a) Điều khiển chính nhận định dạng
Định dạng của tin nhắn nhận được như sau:
Định dạng của tin nhắn nhận được như sau:
| STX0 | CMD | LEN | DATAn | DỮ LIỆU0 | CHK |
Bảng 4 Mô tả định dạng của tin nhắn nhận được
| số thứ tự | tên | giải thích | mã số | nhận xét |
| 1 | STX0 | Cờ bắt đầu tin nhắn 1 | A5 (H) |
|
| 2 | CMD_JG | Từ lệnh dữ liệu | Xem bảng 5 |
|
| 3 | LEN | DL | Số lượng tất cả các byte ngoại trừ dấu bắt đầu, từ lệnh và tổng kiểm tra |
|
| 4 | Dn | tham số | Xem bảng 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | Xác minh XOR | Ngoại trừ byte hợp lệ, tất cả các byte khác đều được XOR |
|
Mô tả trạng thái nhận điều khiển chính:
Bảng 5 mô tả từ dữ liệu được máy đo khoảng cách gửi đến bộ điều khiển chính
Bảng 5 mô tả từ dữ liệu được máy đo khoảng cách gửi đến bộ điều khiển chính
| số thứ tự | CW | chức năng | byte dữ liệu | nhận xét | chiều dài tổng thể |
| 1 | 0x00 | ngưng | D1=00(H)D0=00(H) |
|
Sáu byte |
| 2 | 0x03 | tự kiểm tra | D8 ~D1 | D8-D7: Điện áp -5V, đơn vị 0,01V.D6-D5: Giá trị điểm mù, đơn vị 1mD4: Giá trị điện áp cao APD, đơn vị V;D3: loại char, biểu thị nhiệt độ APD, đơn vị: độ C;D2-D1: Điện áp +5V, đơn vị 0,01V | 12 byte |
| 3 | 0x04 | Khoảng cách đến cơ sở truy cập gần nhất, đơn vị m | D1 D0 | DATA mô tả giá trị khoảng cách gần nhất, đơn vị 1m; Bắt đầu ở mức cao và kết thúc ở mức thấp | Sáu byte |
| 4 | 0x06 | Số lượng truy vấn đầu ra ánh sáng tích lũy | D3~D0 | DATA biểu thị số lượng đèn, 4 byte, với byte cao đầu tiên | Bảy byte |
| 5 | 0x11 | Nguồn APD đang bật | D1=00(H)D0=00(H) | Nguồn APD đang bật | Sáu byte |
| 6 | 0x12 | APD tắt nguồn | D1=00(H)D0=00(H) | Nguồn APD tắt | Sáu byte |
| 7 | 0xED | Làm thêm giờ | 0x00 0x00 | Laser được bảo vệ làm việc bằng laser và không thể đo được. | Sáu byte |
| 8 | 0xEE | Lỗi hiệu quả | 0x00 0x00 |
|
Sáu byte |
| 9 | 0XEF | Hết thời gian chờ giao tiếp cổng nối tiếp | 0x00 0x00 |
|
Sáu byte |
| 10 | 0x01 | Đo phạm vi đơn (mục tiêu đơn, 0 cho mục tiêu thứ hai và thứ ba, 0 cho mục tiêu thứ ba ở đầu và cuối mục tiêu) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 khoảng cách mục tiêu thứ nhất (đơn vị 0,1m)Khoảng cách D5-D3 đến mục tiêu thứ hai (đơn vị: 0,1m)D2-D0 khoảng cách mục tiêu thứ ba (đơn vị 0,1m)3. Mục tiêu từ gần đến xaD9 (bit7-bit0) byte cờ:D9 là vị trí thứ 7 biểu thị sóng chính; 1: có sóng chính, 0: không có sóng chính. D9 là vị trí thứ 6 biểu thị tiếng vang; 1: có tiếng vang, 0: không có tiếng vangD9 Vị trí thứ năm cho biết trạng thái laser; 1: laser bình thường, 0: lỗi laserD9 là bit thứ tư của cờ hết giờ, 1: bình thường, 0: timeoutD9 không hợp lệ ở vị trí thứ 3 (được đặt thành 1);D9 Vị trí thứ hai biểu thị trạng thái APD; 1: bình thường, 0: errorD9 là vị trí đầu tiên cho biết có mục tiêu trước đó hay không; 1: có mục tiêu trước đó, 0: không có mục tiêu trước đó (mục tiêu nằm trong vùng mù).D9 Bit thứ 0 cho biết có mục tiêu tiếp theo hay không; 1: có mục tiêu tiếp theo, 0: không có mục tiêu tiếp theo (mục tiêu sau mục tiêu chính là mục tiêu tiếp theo) | 14 byte |
| 11 | 0x02 | Phạm vi liên tục (mục tiêu đơn, 0 cho mục tiêu thứ hai và thứ ba, 0 cho mục tiêu thứ ba ở đầu và cuối mục tiêu) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 khoảng cách mục tiêu thứ nhất (đơn vị 0,1m)Khoảng cách D5-D3 đến mục tiêu thứ hai (đơn vị: 0,1m)D2-D0 khoảng cách mục tiêu thứ ba (đơn vị 0,1m)3. Mục tiêu từ gần đến xaD9 (bit7-bit0) byte cờ:D9 là bit thứ 7 để biểu thị sóng chính; 1: có sóng chính, 0: không có sóng chính. D9 là vị trí thứ 6 biểu thị tiếng vang; 1: có tiếng vang, 0: không có tiếng vangD9 Vị trí thứ năm cho biết trạng thái laser; 1: laser bình thường, 0: lỗi laserD9 là bit thứ tư của cờ hết giờ, 1: bình thường, 0: timeoutD9 không hợp lệ ở vị trí thứ 3 (được đặt thành 1);D9 Vị trí thứ hai biểu thị trạng thái APD; 1: bình thường, 0: errorD9 là vị trí đầu tiên cho biết có mục tiêu trước đó hay không; 1: có mục tiêu trước đó, 0: không có mục tiêu trước đó (mục tiêu nằm trong vùng mù).D9 Bit thứ 0 cho biết có mục tiêu tiếp theo hay không; 1: có mục tiêu tiếp theo, 0: không có mục tiêu tiếp theo (mục tiêu sau mục tiêu chính là mục tiêu tiếp theo) | 14 byte |
| 12 | 0xEB | Truy vấn số | D17…… D0 | D17 D16 D15 D14 D13 D12 Mã model toàn bộ máyD11D10 Số sản phẩmD9 Phiên bản phần mềm D6D5 D4 Số APDD3 D2 Số laserPhiên bản D1 của FPGA | 22 byte |
| Lưu ý: ① Byte/bit dữ liệu không xác định, mặc định là 0; | |||||
Thẻ nóng: Mô-đun đo khoảng cách laser an toàn cho mắt 5km (LRF), Nhà sản xuất, Nhà cung cấp, Nhà máy, Trung Quốc, Sản xuất tại Trung Quốc, Tùy chỉnh, Chất lượng cao
Danh mục liên quan
Mô-đun tìm phạm vi laser 905nm
Mô-đun tìm phạm vi laser 1535nm
Mô-đun tìm phạm vi laser 1570nm
Mô -đun laser 1.54um
Chỉ định mục tiêu laser 1064nm
Mô -đun STEM chống drone
Mô-đun Lidar khác nhau
Gửi yêu cầu
Xin vui lòng gửi yêu cầu của bạn trong mẫu dưới đây. Chúng tôi sẽ trả lời bạn trong 24 giờ.