Trang chủ
>
Các sản phẩm > Mô-đun máy đo khoảng cách laze > Mô-đun tìm phạm vi laser 905nm > Mô-đun máy đo khoảng cách Micro Laser 2km





Mô-đun máy đo khoảng cách Micro Laser 2km
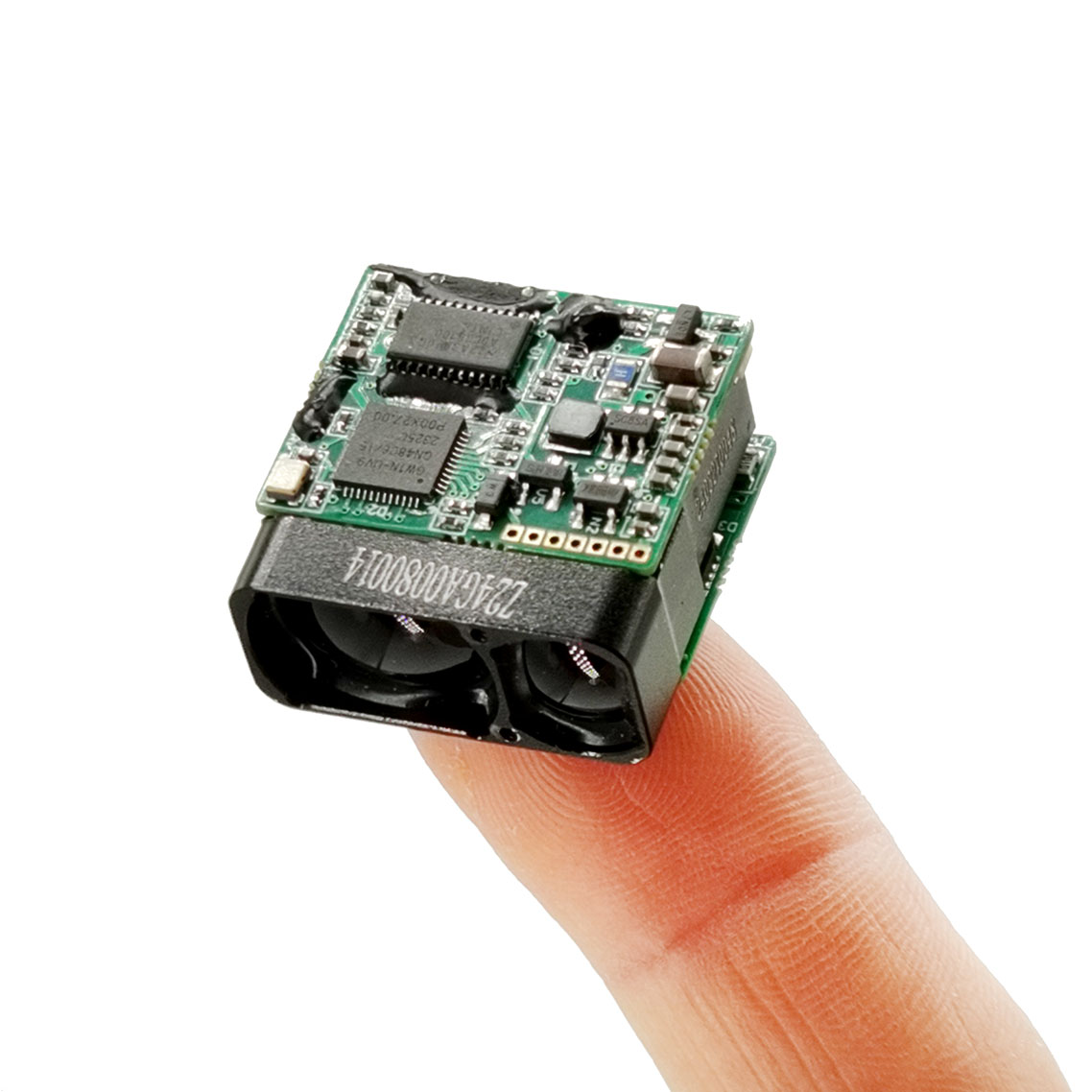
Mô-đun đo phạm vi laser thu nhỏ STA-D20X sử dụng laser bán dẫn 905nm, có đặc tính tầm xa, tiêu thụ điện năng thấp, kích thước nhỏ và an toàn cho mắt. Nó rất thích hợp để tích hợp các máy bay không người lái nhỏ, thiết bị nhìn đêm cầm tay, hình ảnh nhiệt và các thiết bị khác.
Gửi yêu cầu
Mô tả Sản phẩm
Phạm vi tối đa: 2000m
Độ chính xác dao động: ± 1m
Tần số dao động: Phạm vi bắn một lần, 1Hz, 2Hz
Trọng lượng: 10g ± 0,5g
Các tính năng chính:
Công nghệ Laser bán dẫn: Độ tin cậy cao, nhỏ gọn và tiêu thụ điện năng thấp hơn so với máy đo khoảng cách thời gian bay (TOF) truyền thống, cho phép tích hợp vào các thiết bị di động và có không gian hạn chế.
Chỉ số hiệu suất sản phẩm
| Số seri | Tên dự án | STA-D20X |
| 1 | An toàn mắt người | Đúng |
| 2 | Bước sóng laser | 905nm |
| 3 | Góc phân kỳ laser | 1×6mrad |
| 4 | Nhận trường nhìn | ~20mrad |
| 5 | Cỡ máy phát | Φ10 × 7,5mm |
| 6 | Nhận cỡ nòng | Φ15×10mm |
| 7 | Phạm vi khác nhau | 5 ~ 2000m |
| 8 | Hướng tín hiệu | ±1m |
| 9 | Tần số đo | Phạm vi chụp một lần, 1Hz, 2Hz |
| 10 | Tỷ lệ chính xác | ≥98% |
| 11 | Tỷ lệ báo động sai | 1% |
| 12 | Giao diện dữ liệu | UART(TTL_3.3V) |
| 13 | điện áp cung cấp | DC 3 ~ 5V |
| 14 | Tiêu thụ điện năng | Chế độ chờ: .60.6W@3.3V; Công việc: 1W@3.3V; |
| 15 | ||
| 16 | Trọng lượng | 10 ± 0,5g |
| 17 | Kích thước(L×W×H) | 26 × 25 × 13,5mm |
| 18 | Nhiệt độ hoạt động | -20~+60oC |
| 19 | Nhiệt độ bảo quản | -30~+60oC |
| 20 | Sốc | 1200g, 1ms |
| 21 | Rung | b) Công suất tiêu thụ khi chờ: ≤ 0,8W; |
| 22 | Độ tin cậy | MTBF ≥1500h |
| 23 | Thời gian khởi động | 200ms; |
| 24 | Giao diện điện | Ổ cắm: 0,8WTB-6AB-01Cắm: 0,8WTB-6Y-2 |
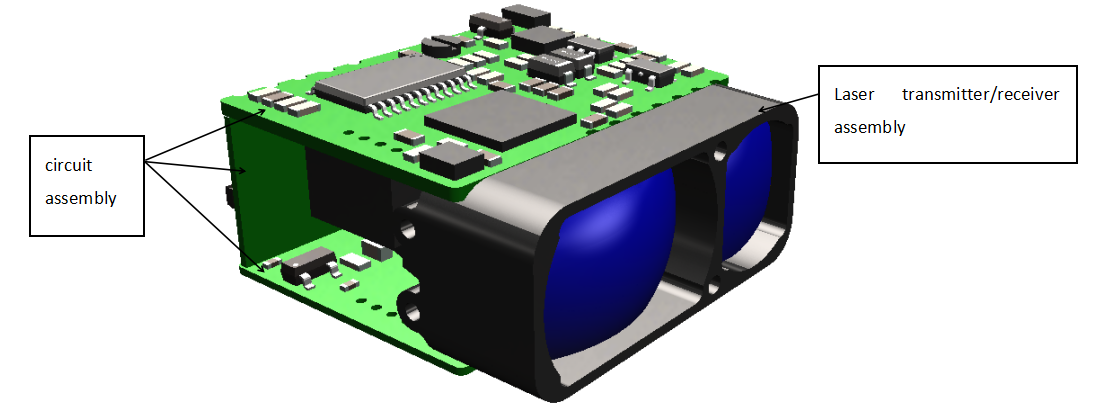
Thành phần mô-đun
Các thành phần chính của sản phẩm máy đo khoảng cách laser như sau:
a) Thành phần thu và phát;
b) Các thành phần mạch; 26mm × 25 mm × 13,5mm (L × W × H), trọng lượng là 10g ± 0,5g và hình dáng của nó được hiển thị trong Hình.1.
Hình 1 Hình thức sản phẩm
Giao diện cài đặt cấu trúc
Kích thước bên ngoài của giao diện cơ và quang được thể hiện trong Hình 2.
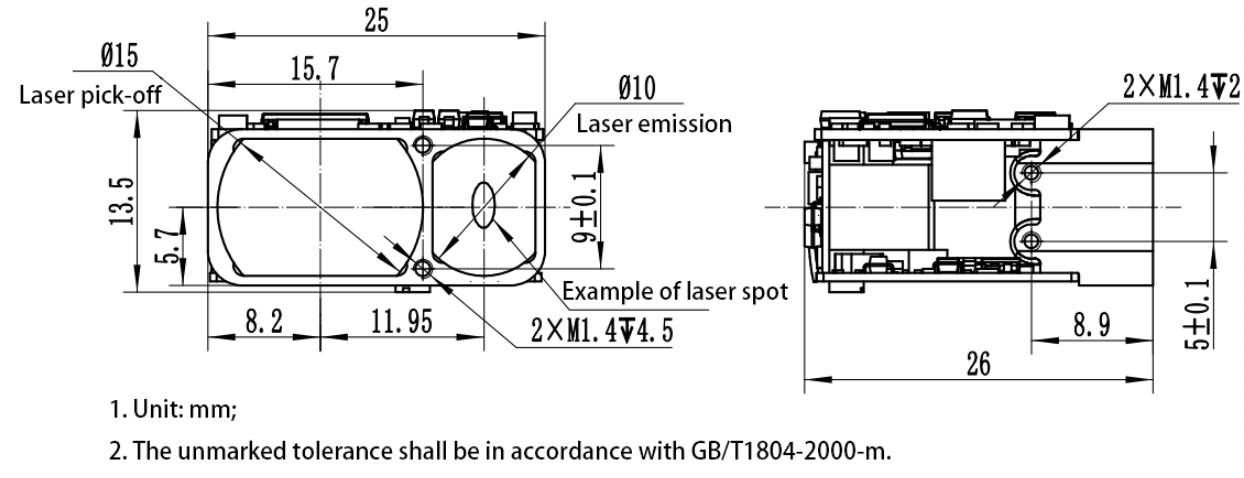
Hình 2 Sơ đồ giao diện cơ và quang
Giao diện điện
Các yêu cầu về giao diện điện như sau:
a) Điện áp nguồn: 3V~5,5V (giá trị điển hình 3,3V hoặc 5V);
b) Công suất tiêu thụ khi chờ: ≤ 0,8W;
c) Công suất tiêu thụ trung bình: ≤ 1W;
d) Đầu máy tính phía trên đạt được thử nghiệm liên kết ngang với đầu nối 0,8WTB-6AB-01 của máy đo khoảng cách (Yueqing Huabao) thông qua đầu nối 0,8WTB-6Y-2. Các định nghĩa về các chân của nguồn điện và cổng giao tiếp ở đầu máy đo khoảng cách được thể hiện trong Bảng 1 và các vị trí chân của đầu nối được thể hiện trong Hình 3.
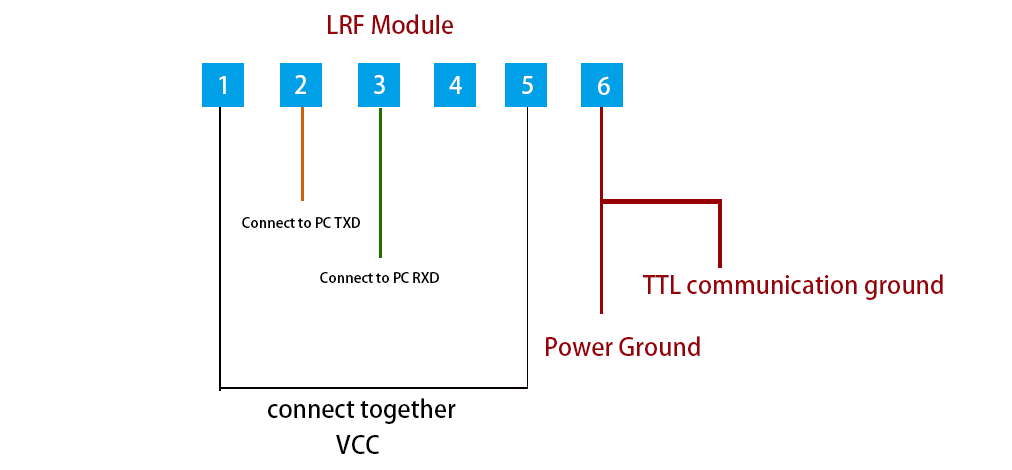
Bảng 2 Định nghĩa Pin điện của sản phẩm
| Ghim | Ghi nhãn | Định nghĩa đặc tính điện | Hướng tín hiệu |
| 1 | Nguồn-EN | ||
| 2 | TTL_RXD | Cổng đầu vào tín hiệu | Máy tính chủ đến máy đo khoảng cách |
| 3 | TTL_TXD | Cổng xuất tín hiệu | Rangefinder đến máy tính chủ |
| 4 | NC | ||
| 5 | Nguồn điện+ | ||
| 6 | GND |
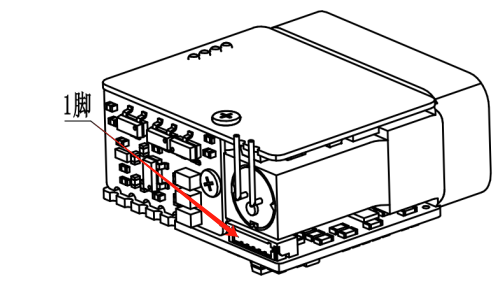
Sơ đồ kết nối điện
Mô-đun truyền thông
dữ liệu
u Tốc độ Baud: 115200bps;
u Định dạng truyền byte đơn: gồm 1 bit start, 8 bit dữ liệu, không kiểm tra, 1 bit stop, dữ liệu 8 bit được truyền đầu tiên ở mức thấp và sau đó ở mức cao;
Giao thức
Lệnh phạm vi đơn
Lưu ý: Gửi mã xác minh = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Mã xác minh đã nhận = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Gửi đến mô-đun khác nhau
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | 0x88 | 0x88 | 0x88 | 0x88 | 0x88 | kiểm tra mã |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | 0x88 | trạng thái | 0xFF | DATA_H | DATA_L | kiểm tra mã |
Trạng thái=0, đo một lần không thành công; DATA_H=0xFF, DATA_L=0xFF; trạng thái=1, đo một lần thành công; DATA_H=byte cao của kết quả đo; DATA_L=byte thấp của kết quả đo.
Lệnh đo liên tục
Lưu ý: Gửi mã xác minh = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Mã xác minh đã nhận = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Gửi đến mô-đun khác nhau
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | tần số | 0x88 | 0x88 | 0x88 | 0x88 | kiểm tra mã |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | tần số | trạng thái | 0xFF | DATA_H | DATA_L | kiểm tra mã |
Trạng thái=0, đo liên tục không thành công; DATA_H=0xFF, DATA_L=0xFF; trạng thái=1, đo liên tục thành công; DATA_H=byte cao của kết quả đo; DATA_L=byte thấp của kết quả đo.
Trạng thái=0, phép đo liên tục không thể đóng được; trạng thái = 1, quá trình đo liên tục thành công sẽ được đóng lại.
Dừng đo
Gửi đến mô-đun khác nhau:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | 0x8E | 0x88 | 0x88 | 0x88 | 0x88 | kiểm tra mã |
Mô-đun phạm vi trả về:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Sự miêu tả | 0x55 | 0xAA | 0x8E | trạng thái | 0x88 | 0x88 | 0x88 | kiểm tra mã |
Trạng thái=0, phép đo liên tục không thể đóng được; trạng thái = 1, quá trình đo liên tục thành công sẽ được đóng lại.
Lưu ý: Dữ liệu được trả về dưới dạng thập lục phân và tất cả kết quả dữ liệu sẽ được xuất ra bằng cách nhân dữ liệu thực với 10;
Ví dụ: dist=2000.3m, dữ liệu đầu ra là 20003, được chuyển đổi sang hệ thập lục phân là 4E23, tức là Data1=0x4E và Data2=0x23.
Thẻ nóng: Mô-đun máy đo khoảng cách siêu nhỏ 2km, nhà sản xuất, nhà cung cấp, nhà máy, Trung Quốc, sản xuất tại Trung Quốc, tùy chỉnh, chất lượng cao
Danh mục liên quan
Mô-đun tìm phạm vi laser 905nm
Mô-đun tìm phạm vi laser 1535nm
Mô-đun tìm phạm vi laser 1570nm
Mô -đun laser 1.54um
Chỉ định mục tiêu laser 1064nm
Mô -đun STEM chống drone
Mô-đun Lidar khác nhau
Gửi yêu cầu
Xin vui lòng gửi yêu cầu của bạn trong mẫu dưới đây. Chúng tôi sẽ trả lời bạn trong 24 giờ.





")